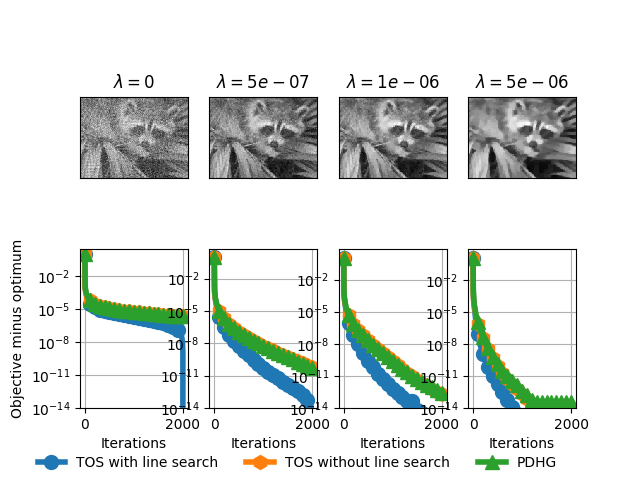
Total variation regularization¶
Comparison of solvers with total variation regularization.
Out:
#features 17595
148678.59278572001
148678.59278572001
148678.59278572001
148678.59278572001
import numpy as np
from scipy import misc, sparse
from scipy.sparse import linalg as splinalg
from scipy.ndimage import gaussian_filter as gf
import pylab as plt
import copt as cp
np.random.seed(0)
img = misc.face(gray=True).astype(np.float)
img /= img.max()
img = misc.imresize(img, 0.15)
n_rows, n_cols = img.shape
n_features = n_rows * n_cols
n_samples = n_features
max_iter = 2000
print('#features', n_features)
# .. compute blurred and noisy image ..
A = sparse.load_npz('data/blur_matrix.npz')
b = A.dot(img.ravel()) + np.random.randn(n_samples)
np.random.seed(0)
n_samples = n_features
# .. compute the step-size ..
s = splinalg.svds(A, k=1, return_singular_vectors=False,
tol=1e-3, maxiter=500)[0]
L = cp.utils.get_lipschitz(A, 'square')
step_size = 1./L
f_grad = cp.utils.SquareLoss(A, b).func_grad
def loss(x, beta):
img = x.reshape((n_rows, n_cols))
tmp1 = np.abs(np.diff(img, axis=0))
tmp2 = np.abs(np.diff(img, axis=1))
return f_grad(x)[0] + beta * (tmp1.sum() + tmp2.sum())
# .. run the solver for different values ..
# .. of the regularization parameter beta ..
all_betas = [0, 5e-7, 1e-6, 5e-6]
all_trace_ls, all_trace_nols, all_trace_pdhg, out_img = [], [], [], []
all_trace_ls_time, all_trace_nols_time, all_trace_pdhg_time = [], [], []
for i, beta in enumerate(all_betas):
def g_prox(x, step_size):
return cp.tv_prox.prox_tv1d_cols(
step_size * beta, x, n_rows, n_cols)
def h_prox(x, step_size):
return cp.tv_prox.prox_tv1d_rows(
step_size * beta, x, n_rows, n_cols)
cb_tosls = cp.utils.Trace()
x0 = np.zeros(n_features)
cb_tosls(x0)
tos_ls = cp.minimize_TOS(
f_grad, x0, g_prox, h_prox,
step_size=5 * step_size,
max_iter=max_iter, tol=1e-14, verbose=1,
callback=cb_tosls, h_Lipschitz=beta)
trace_ls = np.array([loss(x, beta) for x in cb_tosls.trace_x])
all_trace_ls.append(trace_ls)
all_trace_ls_time.append(cb_tosls.trace_time)
out_img.append(tos_ls.x.reshape(img.shape))
cb_tos = cp.utils.Trace()
x0 = np.zeros(n_features)
cb_tos(x0)
tos = cp.minimize_TOS(
f_grad, x0, g_prox, h_prox,
step_size=step_size,
max_iter=max_iter, tol=1e-14, verbose=1,
line_search=False, callback=cb_tos)
trace_nols = np.array([loss(x, beta) for x in cb_tos.trace_x])
all_trace_nols.append(trace_nols)
all_trace_nols_time.append(cb_tos.trace_time)
cb_pdhg = cp.utils.Trace()
x0 = np.zeros(n_features)
cb_pdhg(x0)
pdhg_nols = cp.gradient.minimize_PDHG(
f_grad, x0, g_prox, h_prox,
callback=cb_pdhg, max_iter=max_iter,
step_size=step_size,
step_size2=(1. / step_size) / 2, tol=0, line_search=True)
trace_pdhg = np.array([loss(x, beta) for x in cb_pdhg.trace_x])
all_trace_pdhg.append(trace_pdhg)
all_trace_pdhg_time.append(cb_pdhg.trace_time)
print(step_size)
# .. plot the results ..
f, ax = plt.subplots(2, 4, sharey=False)
xlim = [0.02, 0.02, 0.1]
for i, beta in enumerate(all_betas):
ax[0, i].set_title(r'$\lambda=%s$' % beta)
ax[0, i].imshow(out_img[i],
interpolation='nearest', cmap=plt.cm.gray)
ax[0, i].set_xticks(())
ax[0, i].set_yticks(())
fmin = min(np.min(all_trace_ls[i]), np.min(all_trace_nols[i]))
scale = all_trace_ls[i][0] - fmin
plot_tos, = ax[1, i].plot(
(all_trace_ls[i] - fmin) / scale,
lw=4, marker='o', markevery=100,
markersize=10)
plot_nols, = ax[1, i].plot(
(all_trace_nols[i] - fmin) / scale,
lw=4, marker='h', markevery=100,
markersize=10)
plot_pdhg, = ax[1, i].plot(
(all_trace_pdhg[i] - fmin) / scale,
lw=4, marker='^', markevery=100,
markersize=10)
ax[1, i].set_xlabel('Iterations')
ax[1, i].set_yscale('log')
ax[1, i].set_ylim((1e-14, None))
ax[1, i].grid(True)
plt.gcf().subplots_adjust(bottom=0.15)
plt.figlegend(
(plot_tos, plot_nols, plot_pdhg),
('TOS with line search', 'TOS without line search', 'PDHG'), ncol=5,
scatterpoints=1,
loc=(-0.00, -0.0), frameon=False,
bbox_to_anchor=[0.05, 0.01])
ax[1, 0].set_ylabel('Objective minus optimum')
plt.show()
Total running time of the script: ( 1 minutes 45.779 seconds)
